2.2 Interpolação
Ajude a manter o site livre, gratuito e sem propagandas. Colabore!
Em revisão
Dada uma função contínua em um triângulo com nodos , , sua interpolação linear é definida por
| (2.10) |
Logo, temos para todo .
Exemplo 2.2.1.
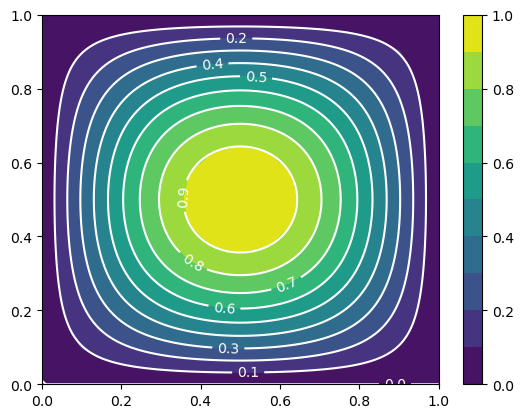
Consideramos a função
| (2.11) |
defina no domínio . O seguinte código computa a interpolação de no espaço de elementos finitos sobre uma malha uniforme de triângulos. Com ele, graficamos a função interpolada e a função . Consulte a Fig. 2.3.
Afim de determinarmos estimativas para o erro de interpolação, precisamos da chamada derivada total de primeira ordem
| (2.12) |
e da derivada total de segunda ordem
| (2.13) |
Proposição 2.2.1.
(Erro da interpolação no espaço linear.) A interpolação satisfaz as seguintes estimativas
| (2.14) | ||||
| (2.15) |
Demonstração.
Veja [1, Capítulo 4]. ∎
Observação 2.2.1.
A interpolação no espaço de uma dada função no domínio é denotada também por e definida por
| (2.16) |
Proposição 2.2.2.
(Erro da interpolação no espaço contínuo linear por partes.) O interpolador satisfaz as seguintes estimativas
| (2.17) | |||
| (2.18) |
Demonstração.
Demonstração análoga a Proposição 1.1.2. ∎
Observação 2.2.2.
(Taxa de convergência.) A taxa de convergência (ou ordem de truncamento) do erro de interpolação é definida como a potência do na estimativa (2.17). Esta taxa pode ser computacionalmente estimada. De fato, o erro de interpolação para uma dada malha tem a forma . Conhecendo para uma outra malha , podemos resolver para , obtendo a estimativa
| (2.19) |
Exemplo 2.2.2.
Consideramos a interpolação feita no Exemplo 2.2.1. Aqui, computamos o erro de interpolação na norma , i.e.
| (2.20) |
para diferentes refinamentos de malha.
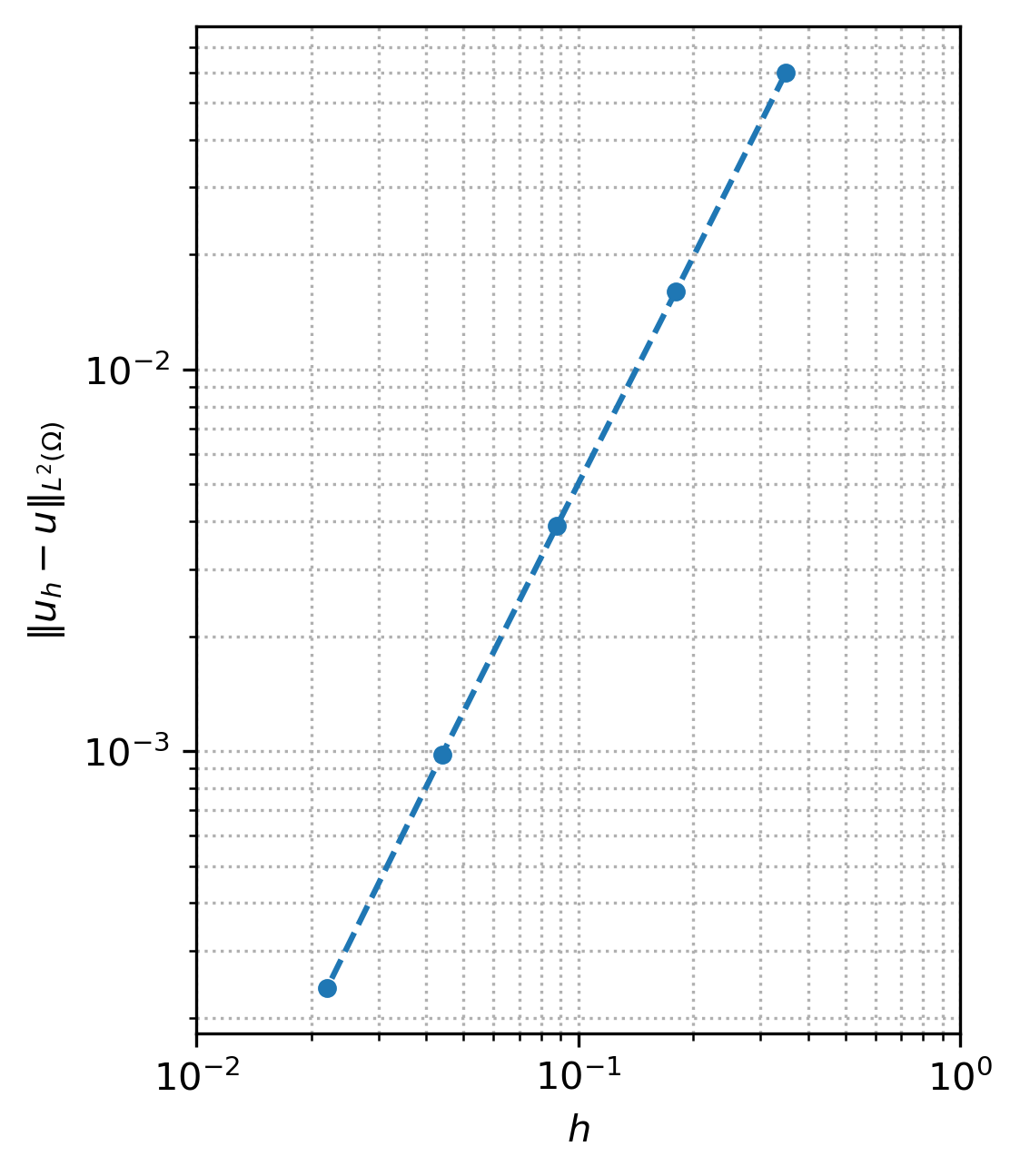
Na Tabela 2.1, temos o número de células e seu tamanho , o erro de interpolação e a estimativa da taxa de convergência dada por (2.19).
| #células | |||
|---|---|---|---|
| -x- | |||
| 1.91 | |||
| 2.04 | |||
| 1.99 | |||
| 2.03 |
2.2.1 Exercícios
Em construção
Envie seu comentário
As informações preenchidas são enviadas por e-mail para o desenvolvedor do site e tratadas de forma privada. Consulte a Política de Uso de Dados para mais informações. Aproveito para agradecer a todas/os que de forma assídua ou esporádica contribuem enviando correções, sugestões e críticas!