4.1 Método de Euler
Ajude a manter o site livre, gratuito e sem propagandas. Colabore!
Dado um Problema de Valor Inicial (PVI)
| (4.2a) | ||||
| (4.2b) |
temos que é a derivada da solução no tempo . Então, aproximando a derivada pela razão fundamental de passo
| (4.3) |
obtemos
| (4.4) | |||
| (4.5) |
Isto nos motiva a iteração do Método de Euler88endnote: 8Leonhard Paul Euler, 1707-1783, matemático e físico suíço. Fonte: Wikipédia: Ronald Fisher.
| (4.6a) | ||||
| (4.6b) |
com , , e passo .
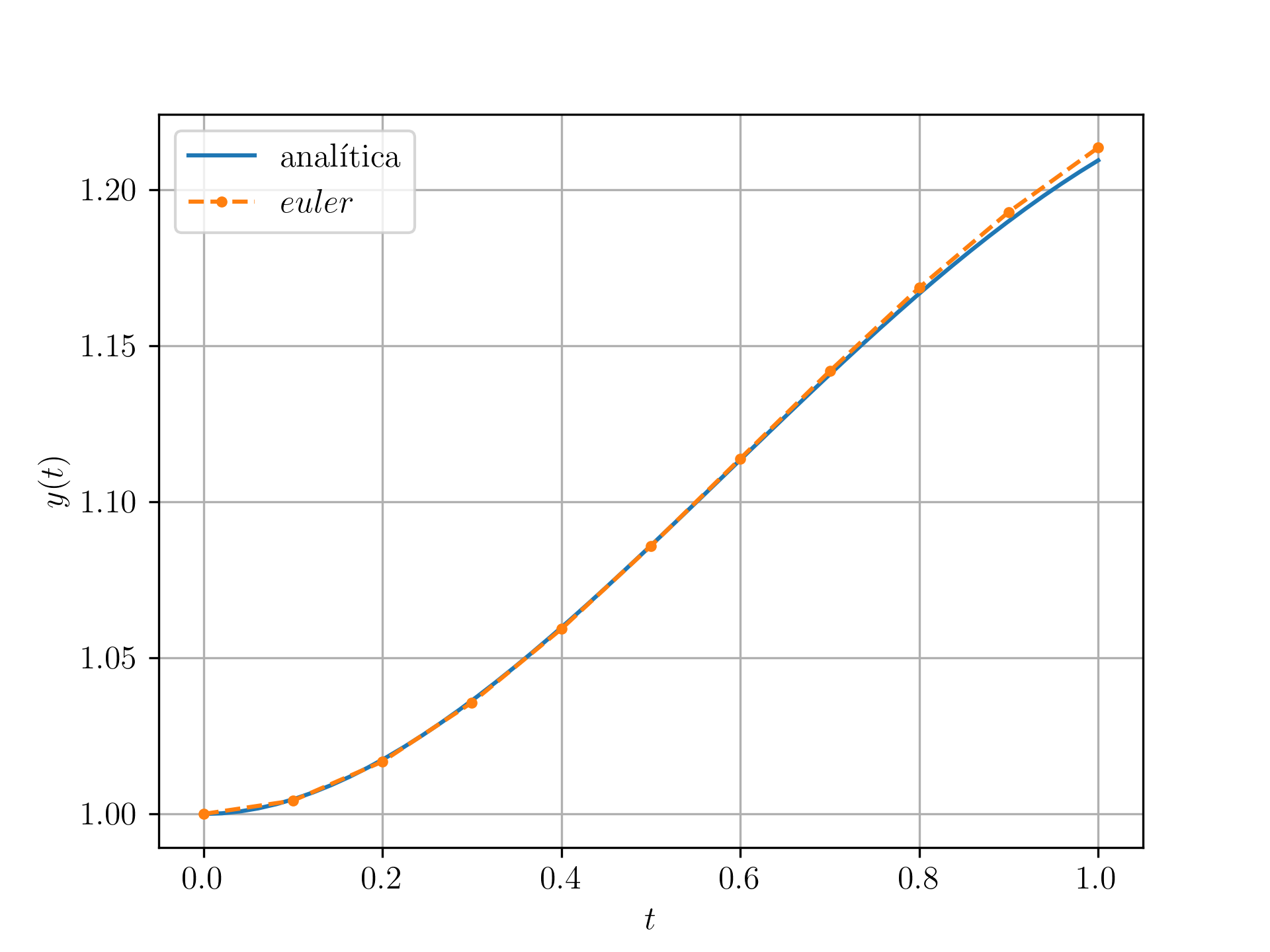
Exemplo 4.1.1.
Consideramos o seguinte problema de valor inicial
| (4.7a) | ||||
| (4.7b) |
Sua solução analítica é
| (4.8) |
Para computarmos a solução pelo Método de Euler, reescrevemos o problema da seguinte forma
| (4.9a) | |||
| (4.9b) |
donde identificamos , e .
4.1.1 Análise Numérica
O Método de Euler com passo aplicado ao problema de valor inicial (4.1), pode ser escrito da seguinte forma
| (4.10a) | ||||
| (4.10b) |
onde representa a aproximação da solução exata no tempo , . Métodos que podem ser escritos dessa forma, são chamados de Métodos de Passo Simples (ou único). No caso específico do Método de Euler, temos
| (4.11) |
Consistência
Agora, considerando a solução exata de (4.1), introduzimos
| (4.12) |
Com isso, vamos analisar o chamado erro de discretização local
| (4.13) |
que estabelece uma medida quantitativa com que a solução exata no tempo satisfaz a iteração do método de passo simples.
Definição 4.1.1.
(Consistência.) Um método de passo simples é dito ser consistente quando
| (4.14) |
ou, equivalentemente, quando
| (4.15) |
Observação 4.1.1.
(Consistência do Método de Euler.) Da Definição 4.1.1, temos que o Método de Euler é consistente. De fato, temos
| (4.16) | ||||
| (4.17) | ||||
| (4.18) |
A ordem do erro de discretização local de um método de passo simples é dita ser , quando
| (4.19) |
ou seja, quando
| (4.20) |
para alguma constante .
Para determinarmos a ordem do Método de Euler, tomamos a expansão em série de Taylor99endnote: 9Brook Taylor, 1685 - 1731, matemático britânico. Fonte: Wikipédia:Brook Taylor. da solução exata em torno de , i.e.
| (4.21) |
para algum . Como , temos
| (4.22) | ||||
| (4.23) | ||||
| (4.24) |
Então, rearranjando os termos em (4.21), obtemos
| (4.25) |
Portanto, para o Método de Euler temos
| (4.26) | ||||
| (4.27) | ||||
| (4.28) | ||||
| (4.29) |
Isto mostra que o Método de Euler é de ordem .
Convergência
A análise acima trata apenas da consistência do Método de Euler. Para analisarmos a convergência de métodos de passo simples, definimos o erro de discretização global
| (4.30) |
onde para . Dizemos que o método é convergente quando
| (4.31) |
Ainda, dizemos que o método tem erro de discretização global de ordem quando
| (4.32) |
para todo , .
Lema 4.1.1.
Demonstração.
De forma iterativa, temos
| (4.35) | ||||
| (4.36) | ||||
| (4.37) | ||||
| (4.38) | ||||
| (4.39) | ||||
| (4.40) |
Observando que para , concluímos que
| (4.41) |
∎
Teorema 4.1.1.
(Estimativa do Error Global.) Considere o PVI (4.1), para , . Suponha que é Lipschitz contínua em
| (4.42) |
para todo e que exista tal que
| (4.43) |
para todo . Então, as iteradas do Método de Euler , , , , satisfazem a seguinte estimativa do erro de discretização global
| (4.44) |
Demonstração.
Observação 4.1.2.
(Convergência.) Do Teorema 4.1.1, a ordem do erro de discretização global de um método de passo simples é igual a sua ordem do erro de discretização local. Portanto, o Método de Euler é convergente e é de ordem .
Erros de Arredondamento
O Teorema 4.1.1 não leva em consideração os erros de arredondamento. Levando em conta esses erros, a iteração do Método de Euler tem a forma
| (4.52a) | |||
| (4.52b) |
onde é o erro devido a arredondamentos na -ésima iterada, , . Assumindo as hipóteses do Teorema 4.1.1, podemos mostrar a seguinte estimativa de erro global
| (4.53) | ||||
para , .
4.1.2 Sistemas de Equações
Seja um sistema de EDOs1010endnote: 10Equações Diferenciais Ordinárias com valor iniciais
| (4.54a) | |||
| (4.54b) |
com dada , dados valores iniciais e incógnita , .
Do ponto de vista algorítmico, a iteração do Método de Euler é diretamente estendida para sistemas:
| (4.55) | ||||
para , , , .
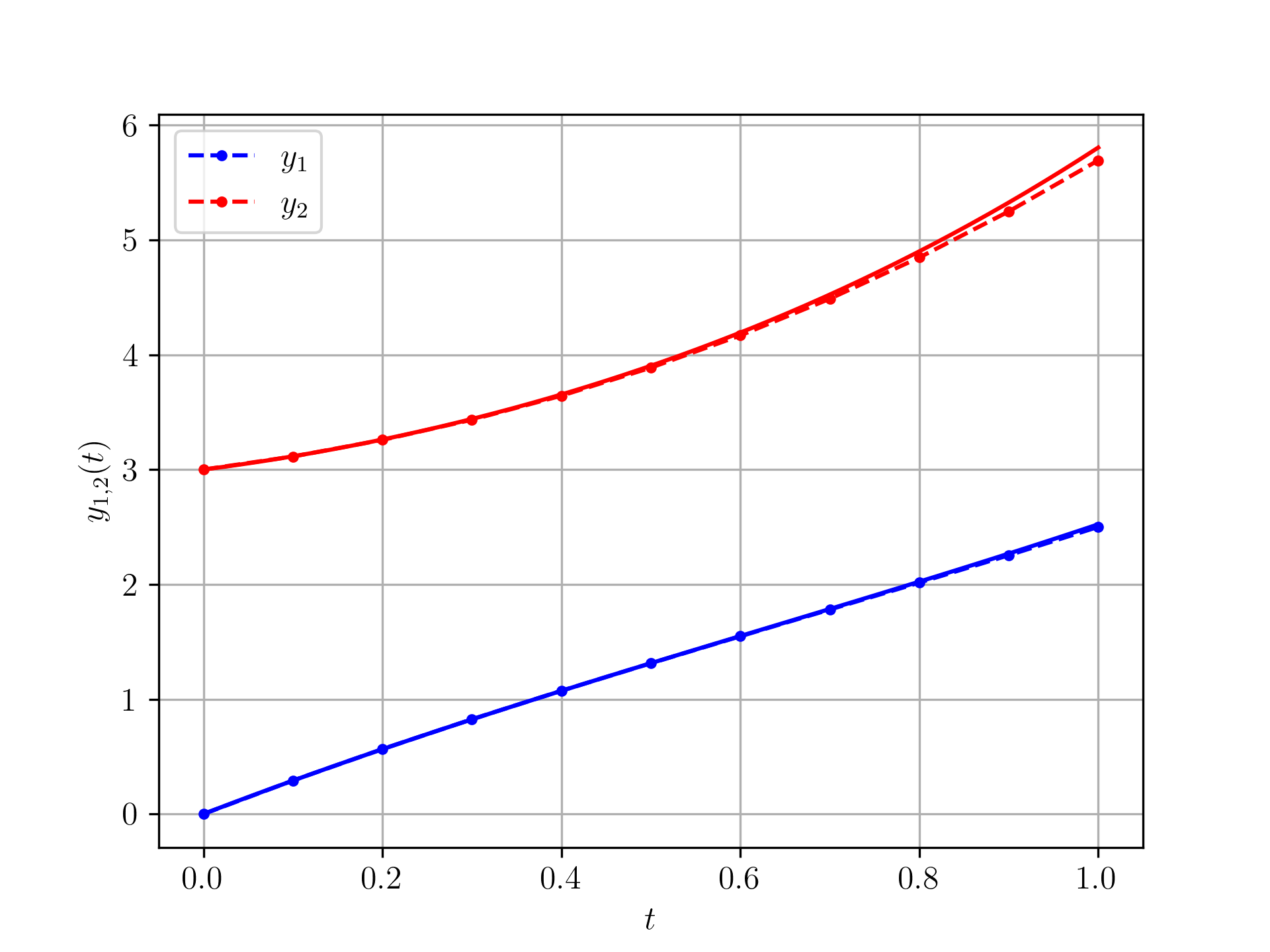
Exemplo 4.1.3.
Consideramos o sistema de EDOs
| (4.56a) | |||
| (4.56b) |
para com condições iniciais
| (4.57a) | |||
| (4.57b) |
Este sistema tem solução analítica
| (4.58a) | |||
| (4.58b) |
Podemos reescrevê-lo na forma vetorial
| (4.59e) | |||
| (4.59j) |
Usando o Método de Euler com obtemos as soluções mostradas na figura abaixo.
4.1.3 Equações de Ordem Superior
Seja dado o PVI de ordem
| (4.60a) | |||
| (4.60b) |
para .
Para resolvê-lo com o Método de Euler, a ideia é reescrevê-lo como um sistema de EDOs de primeira ordem com condições iniciais. Isso pode ser feito com a mudança de variáveis
| (4.61) | |||
| (4.62) | |||
| (4.63) | |||
| (4.64) | |||
| (4.65) |
Com isso e do PVI (4.1.3), obtemos o sistema de EDOs de primeira ordem
| (4.66a) | |||
| (4.66b) | |||
| (4.66c) | |||
| (4.66d) | |||
| (4.66e) |
para e com condições inicias
| (4.67a) | |||
| (4.67b) | |||
| (4.67c) | |||
| (4.67d) | |||
| (4.67e) |
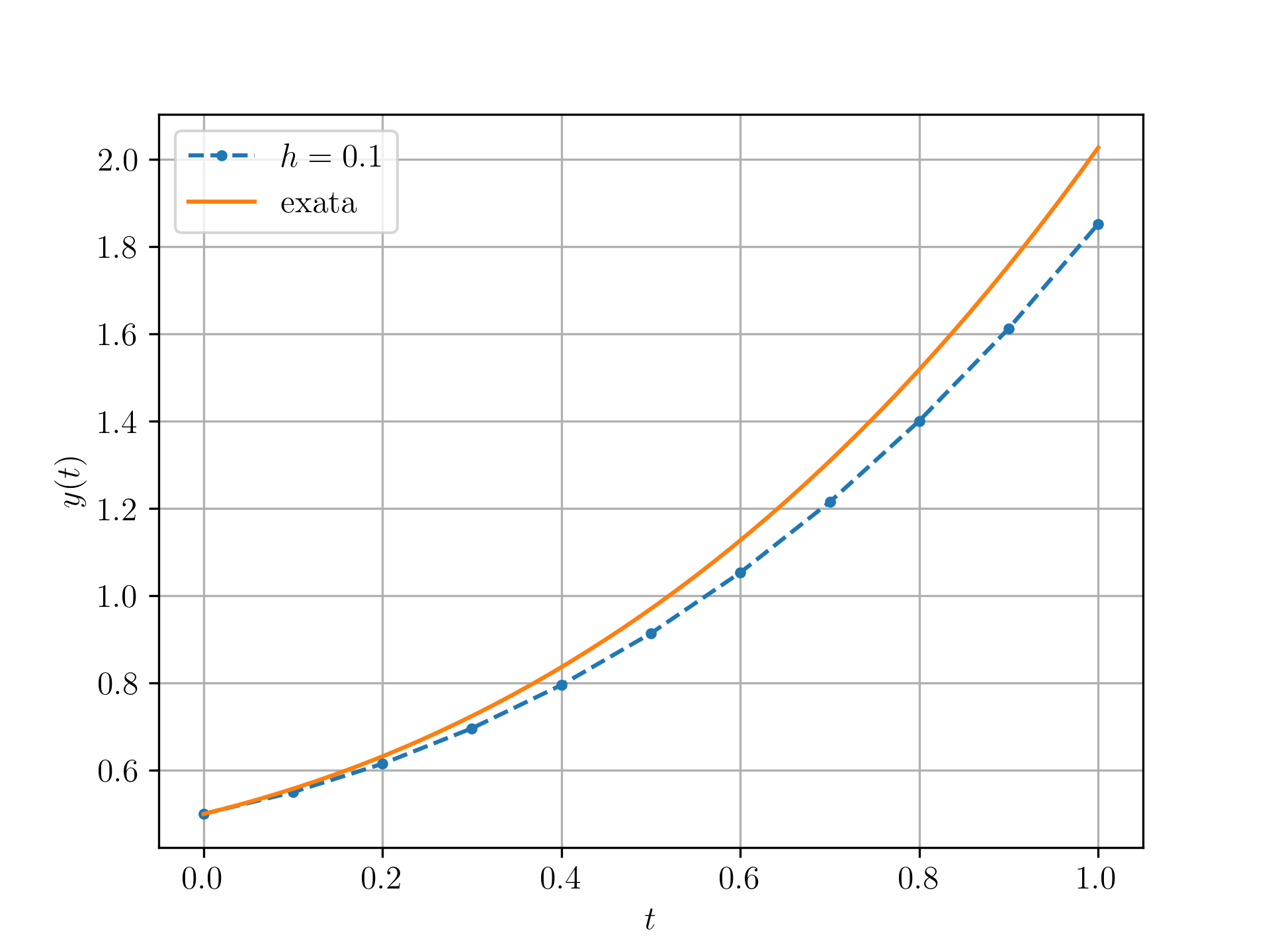
Exemplo 4.1.4.
Consideramos o seguinte PVI de ordem superior
| (4.68a) | |||
| (4.68b) |
Sua solução analítica é
| (4.69) |
Para reescrevê-lo como uma sistema de EDOs de primeira ordem, tomamos as mudanças de variáveis e . Com isso, obtemos
| (4.70a) | |||
| (4.70b) |
para e com condições iniciais
| (4.71a) | |||
| (4.71b) |
Com passo , o Método de Euler aplicado a este sistema fornece a solução do PVI mostrada na figura abaixo.
4.1.4 Exercícios
E. 4.1.1.
O problema de valor inicial
| (4.72a) | |||
| (4.72b) |
tem solução analítica . Compute a aproximação pelo Método de Euler com passo e forneça o erro
Resposta.
,
E. 4.1.2.
Use o Método de Euler para computar a solução de
| (4.73a) | |||
| (4.73b) |
Escolha um passo adequado de forma que seja computado com precisão de dígitos significativos.
Resposta.
,
E. 4.1.3.
Considere o seguinte problema de valor inicial
| (4.74a) | |||
| (4.74b) |
Use o Método de Euler para computar o valor aproximado de com precisão de dígitos significativos.
Resposta.
E. 4.1.4.
Use o Método de Euler para computar a solução de
| (4.75a) | |||
| (4.75b) |
A solução analítica é . Compute a solução aproximação e o erro usando o passo . O erro obtido está de acordo com a estimativa (4.44)?
Resposta.
. Dica: verifique as hipóteses do Teorema 4.1.1.
E. 4.1.5.
Para o sistema de EDOs do Exemplo 4.1.3, verifique a ordem de convergência do Método de Euler computando o erro com diferentes tamanhos de passos .
Resposta.
E. 4.1.6.
Para o PVI de segunda ordem dado no Exemplo 4.1.4, tente computar a solução para tempos finais . Faça uma comparação gráfica entre as soluções numérica e analítica. O que ocorre ao aumentarmos o tempo final? Justifique sua resposta.
Resposta.
Dica: O PVI do Exemplo 4.1.4 é um problema rígido.
Análise Numérica
E. 4.1.7.
Mostre que se , então .
Resposta.
Dica: use o polinômio de Taylor de grau 2 de .
E. 4.1.8.
Resposta.
Dica: estude a demonstração do Teorema 4.1.1.
E. 4.1.9.
Assumindo um erro de arredondamento máximo de , use (4.53) para obter uma estimativa para a melhor escolha de .
Resposta.
. Dica: Encontre o mínimo de .
Envie seu comentário
As informações preenchidas são enviadas por e-mail para o desenvolvedor do site e tratadas de forma privada. Consulte a Política de Uso de Dados para mais informações. Aproveito para agradecer a todas/os que de forma assídua ou esporádica contribuem enviando correções, sugestões e críticas!