6.1 Problemas Lineares
Ajude a manter o site livre, gratuito e sem propagandas. Colabore!
Dado um conjunto de pontos , para , e uma família de funções , o problema linear de aproximação por mínimos quadrados consiste em determinar os coeficientes tal que a função
| (6.1) | |||
| (6.2) |
aproxime o dado conjunto de pontos no sentido de mínimos quadrados, i.e. o vetor dos coeficientes é solução do seguinte problema linear de minimização
| (6.3) |
A fim de trabalharmos com uma notação mais compacta, definimos o resíduo , onde . Com esta notação, o problema de mínimos quadrados se resume a resolver
| (6.4) |
6.1.1 Método das Equações Normais
A fim de resolver o problema de mínimos quadrados (6.4), observamos que o erro quadrático
| (6.5) | |||
| (6.6) | |||
| (6.7) | |||
| (6.8) |
onde e
| (6.9) |
Os parâmetros que minimizam o erro são solução do seguinte sistema de equações
| (6.10) |
onde . Ou, em uma notação mais apropriada,
| (6.11) | |||
| (6.12) | |||
| (6.13) | |||
| (6.14) |
Portanto, o problema linear de mínimos quadrados se resume em resolver as chamadas equações normais
| (6.15) |
Concluímos que a solução é dada por
| (6.16) |
quando é inversível.
Exemplo 6.1.1 (Ajuste de Polinômios).
Considere o problema de ajustar o conjunto de pontos
por um polinômio quadrático
| (6.17) |
no sentido de mínimos quadrados.
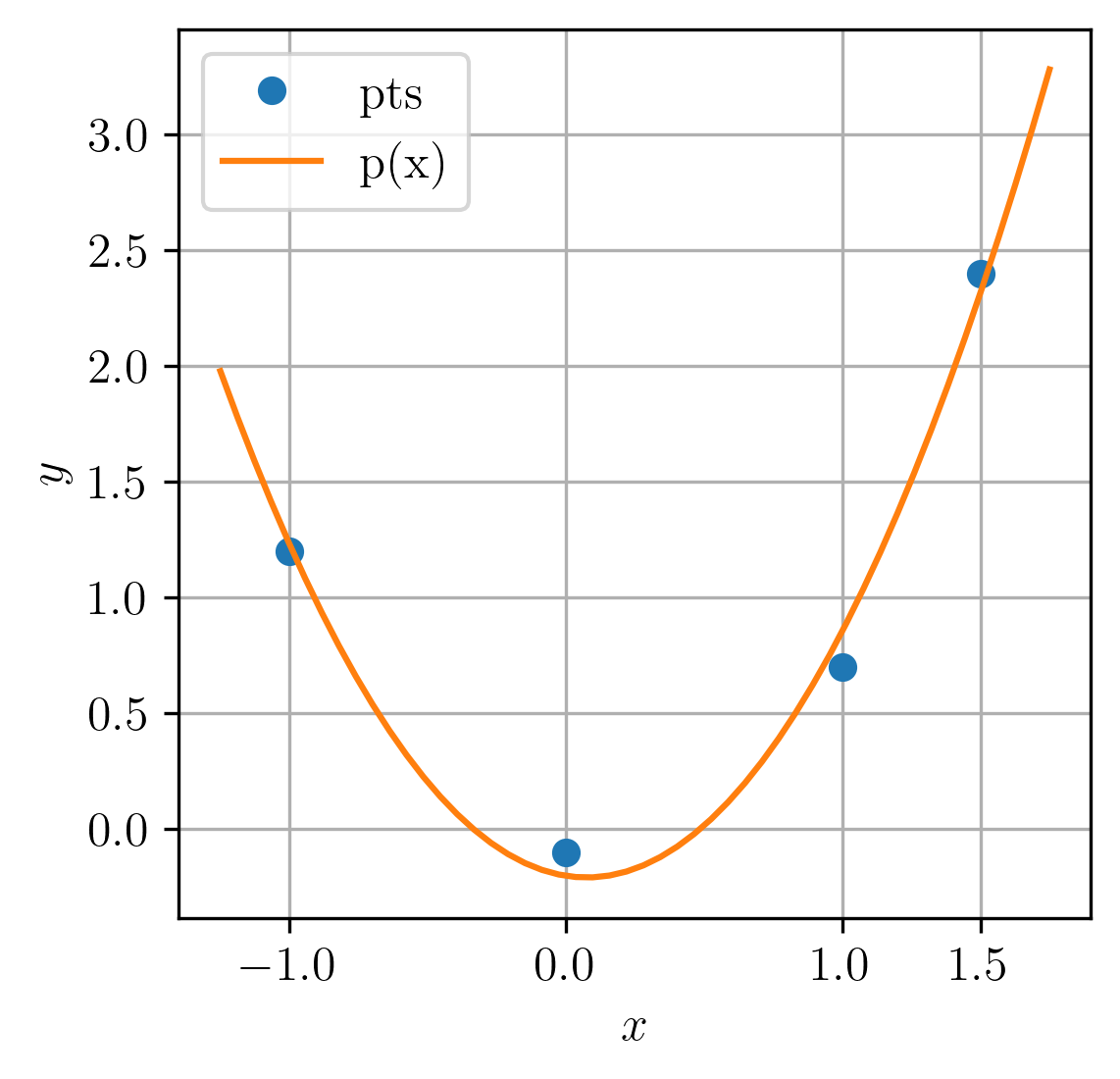
Neste caso, a família de funções do problema de mínimos quadrados é , e . Assim sendo, os coeficientes são solução do seguinte sistema linear
| (6.18) |
onde e
| (6.19) |
Emfim, resolvendo as equações normais (6.18), obtemos
| (6.20) |
A Figura 6.1 mostra um esboço dos pontos e do polinômio ajustado.
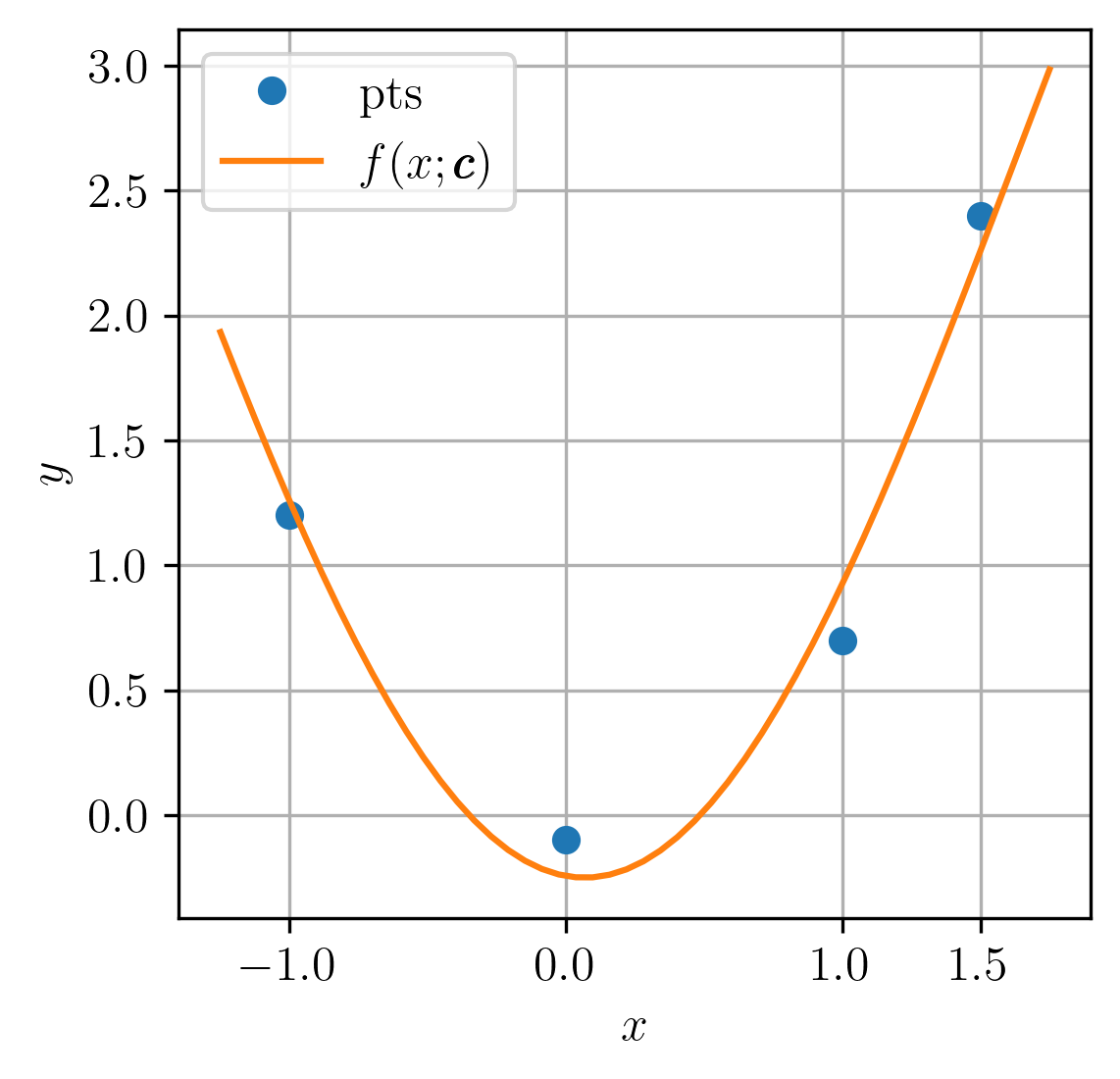
Exemplo 6.1.2 (Ajuste de Curvas).
Consideremos o mesmo conjunto de pontos do exemplo anterior (Exemplo 6.1.1). Aqui, vamos ajustar uma curva da forma
| (6.21) |
no sentido de mínimos quadrados. Para tanto, formamos a matriz
| (6.22) |
e, então, resolvemos as equações normais (6.15) para o vetor de coeficientes . Fazendo isso, obtemos , e . A Figura 6.2 mostra um esboço da curva ajustada aos pontos dados.
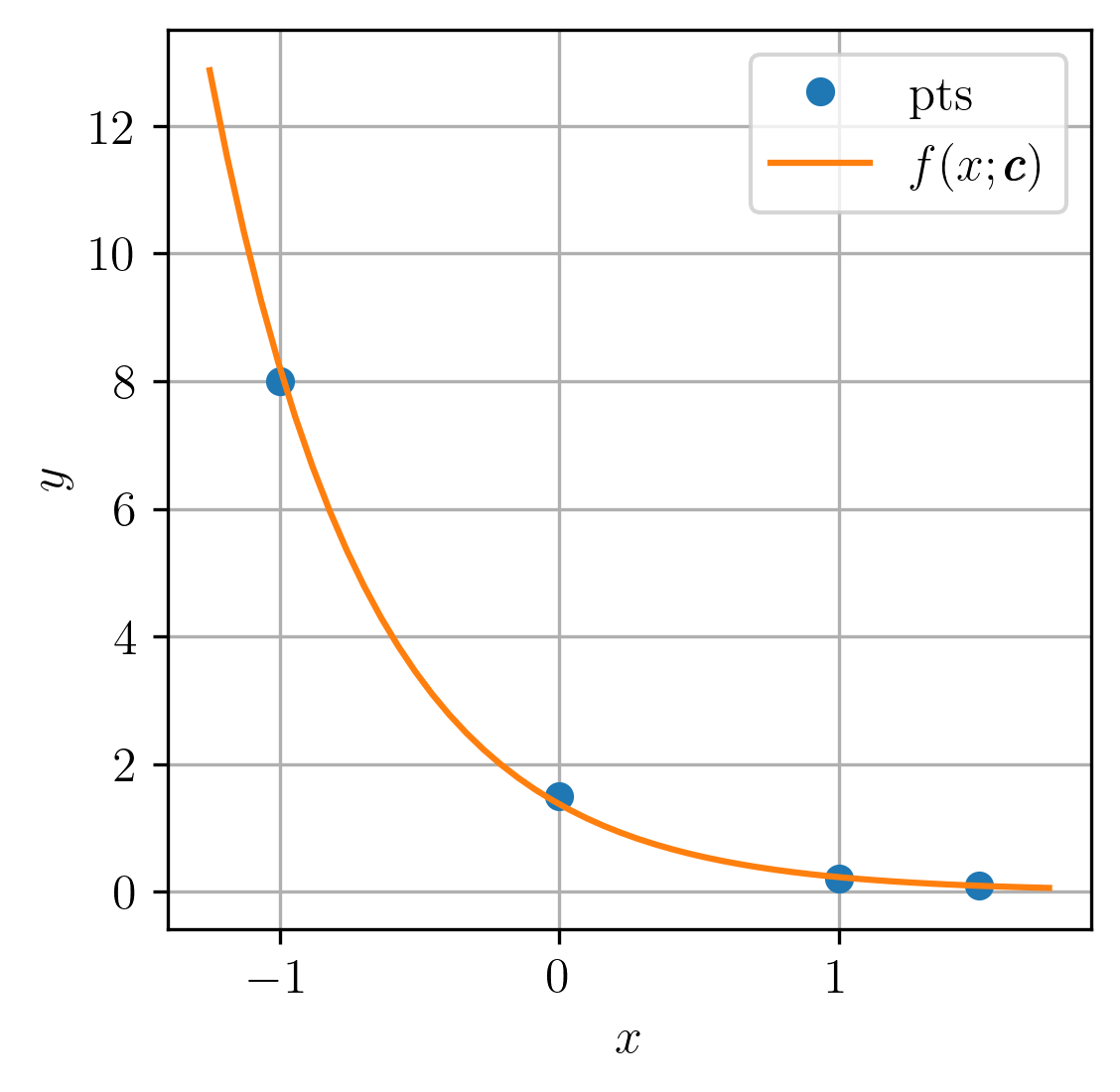
Exemplo 6.1.3 (Um Problema Não-Linear).
Consideramos o problema de ajustar, no sentido de mínimos quadrados, a função
| (6.23) |
ao seguinte conjunto de pontos
Aqui, temos um problema não linear de mínimos quadrados que pode ser transformado em um problema linear fazendo-se
| (6.24) | |||
| (6.25) | |||
| (6.26) |
Isto é, denotando e , o problema se resume a ajustar uma reta ao conjunto de pontos .
Para resolver o problema transformado, formamos a matriz
| (6.27) |
e, então, resolvemos as equações normais , com , donde obtemos e . Das definições de e , temos
| (6.28) | |||
| (6.29) |
A Figura 6.3 mostra um esboço da curva ajustada aos pontos dados.
6.1.2 Análise Numérica
Em revisão
O problema linear de mínimos quadrados (6.4) reduz-se a resolver o sistema linear (6.15) para . Isto nos leva a questão de verificar se é invertível.
Teorema 6.1.1.
A matriz é positiva definida se, e somente se, as colunas de são linearmente independentes.
Demonstração.
Se as colunas de são linearmente independentes, então implica e, equivalentemente, . Portanto, implica , o que mostra que é positiva definida.
Suponhamos, agora, que as colunas de não são linearmente independentes. Então, existe tal que . Mas, então, , o que mostra que não é positiva definida. ∎
Este teorema nos fornece uma condição suficiente para a existência (e unicidade) de solução do problema linear de mínimos quadrados. Mais especificamente, se as colunas da matriz são linearmente independentes, então os coeficientes da função que melhor ajustam os pontos dados são
| (6.30) |
6.1.3 Exercícios
E. 6.1.1.
Determine a reta que melhor se ajusta, no sentido de mínimos quadrados, aos pontos
Por fim, compute a norma do resíduo, i.e. para os pontos dados.
Resposta.
, , .
E. 6.1.2.
Determine o polinômio que melhor se ajusta, no sentido de mínimos quadrados, aos pontos
Por fim, compute a norma do resíduo, i.e. .
Resposta.
, , , ,
E. 6.1.3.
Determine a curva que melhor se ajusta, no sentido de mínimos quadrados, aos pontos
Por fim, compute a norma do resíduo, i.e. .
Resposta.
, , ,
E. 6.1.4.
Use a transformação para ajustar, no sentido de mínimos quadrados, a curva aos pontos
Resposta.
, ,
Envie seu comentário
As informações preenchidas são enviadas por e-mail para o desenvolvedor do site e tratadas de forma privada. Consulte a Política de Uso de Dados para mais informações. Aproveito para agradecer a todas/os que de forma assídua ou esporádica contribuem enviando correções, sugestões e críticas!