Política de uso de dados
Ao navegar por este site, você concorda com a política de uso de dados.Política de uso de dados
Ao navegar por este site, você concorda com a política de uso de dados.Método dos Elementos Finitos
Ajude a manter o site livre, gratuito e sem propagandas. Colabore!
1.6 Malhas auto-adaptativas
Em revisão
Retornemos ao problema modelo (1.63)-(1.64)
| (1.201) | ||||
| (1.202) |
A estimativa a posteriori dada no Teorema 1.2.4, indica que os elementos residuais podem ser utilizados para estimarmos a precisão da aproximação por elementos finitos. Ou seja, espera-se que quanto menores forem os elementos residuais, mais precisa é a solução por elementos finitos. Além disso, como
| (1.203) |
podemos reduzir diminuindo o tamanho da célula .
Do observado acima, motiva-se o seguinte algoritmo de elementos finitos com refinamento automático de malha:
-
1.
Escolhemos uma malha inicial.
-
2.
Iteramos:
-
2.
Resolvemos o problema de elementos finitos na malha corrente.
-
2.
Computamos em cada célula da malha corrente.
-
2.
Com base na malha corrente, Contruímos uma nova malha pelo refinamento das células com os maiores valores de .
-
2.
Verificamos o critério de parada.
-
2.
Uma estratégia clássica para a escolha das células a serem refinadas é a seguinte: refina-se a -ésima célula se
| (1.204) |
onde escolhemos .
Exemplo 1.6.1.
Consideramos o problema
| (1.205) | ||||
| (1.206) |
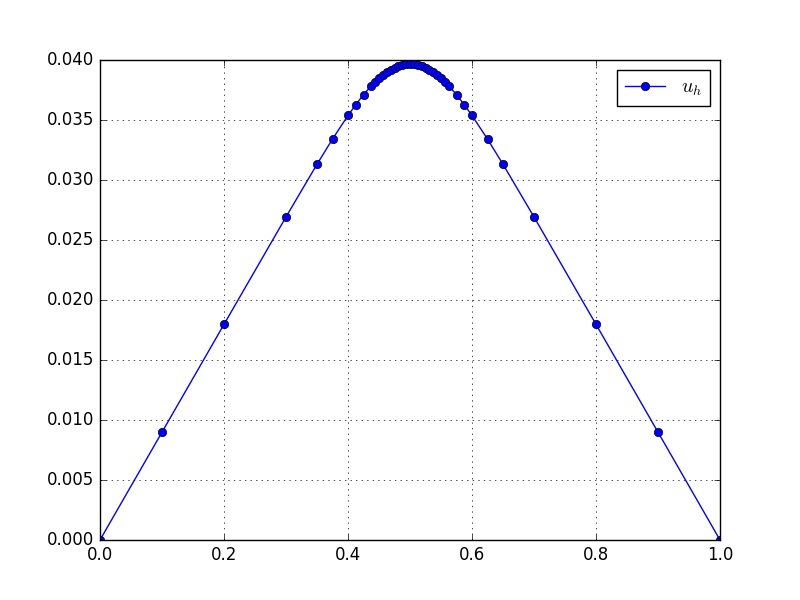
Aqui, computamos aproximações de elementos finitos no espaço das funções lineares por partes com sucessivos refinamentos de malha. Utilizamos uma malha inicial uniforme com 10 células e fazemos, então, 5 refinamentos sucessivos utilizando como critério de refinamento a estratégia (1.204) com . A Figura 1.6 apresenta o esboço do gráfico da solução de elementos finitos na malha mais refinada. Além disso, na Tabela 1.4 temos os o número de células e o máximo respectivo.
| #malha | #células | |
|---|---|---|
| 0 | 10 | 5.0E-03 |
| 1 | 12 | 2.0E-03 |
| 2 | 14 | 8.6E-04 |
| 3 | 22 | 2.9E-04 |
| 4 | 30 | 1.4E-04 |
| 5 | 38 | 6.1E-05 |
Com o FEniCS, a computação do problema de elementos finitos pode ser feita com o seguinte código:
from __future__ import print_function, division
from fenics import *
import numpy as np
import matplotlib.pyplot as plt
# malha
mesh = IntervalMesh(10,0,1)
# espaco
V = FunctionSpace(mesh, ’P’, 1)
# fonte
f = Expression(’exp(-100*pow(fabs(x[0]-0.5),2))’,degree=1)
# condicoes de contorno
def boundary(x,on_boundary):
return on_boundary
#iteracoes
for iter in np.arange(6):
#problema
bc = DirichletBC(V,Constant(0.0),boundary)
u = TrialFunction(V)
v = TestFunction(V)
a = u.dx(0)*v.dx(0)*dx
L = f*v*dx
#resolve
u = Function(V)
solve(a == L, u, bc)
#grafico
plt.close(’all’)
xx = mesh.coordinates()[:,0]
sorted_indices = np.argsort(xx)
yy = u.compute_vertex_values()
plt.plot(xx[sorted_indices],yy[sorted_indices],
marker="o",label=r"$u_h$")
plt.legend(numpoints=1)
plt.grid(’on’)
plt.show()
DG = FunctionSpace(mesh, "DG", 0)
v = TestFunction(DG)
a = CellVolume(mesh)
eta = assemble(f**2*v*a*dx)
# refinamento da malha
cell_markers = MeshFunction("bool", mesh, mesh.topology().dim(), False)
eta_max = np.amax(eta[:])
print(eta_max)
print("%d %d %1.1E\n" % (iter,mesh.num_cells(),eta_max))
alpha = 0.5
for i,cell in enumerate(cells(mesh)):
if (eta[i] > alpha*eta_max):
cell_markers[cell] = True
mesh = refine(mesh, cell_markers)
V = FunctionSpace(mesh, ’P’, 1)
1.6.1 Exercícios
Em revisão
E. 1.6.1.
Use uma estratégia de sucessivos refinamentos globais para resolver o problema dado no Exemplo 1.6.1. Compare seus resultados com aqueles obtidos no exemplo.
Envie seu comentário
Aproveito para agradecer a todas/os que de forma assídua ou esporádica contribuem enviando correções, sugestões e críticas!

Este texto é disponibilizado nos termos da Licença Creative Commons Atribuição-CompartilhaIgual 4.0 Internacional. Ícones e elementos gráficos podem estar sujeitos a condições adicionais.